Weekly outline
DESCRIPCIÓN DE LA ACTIVIDAD
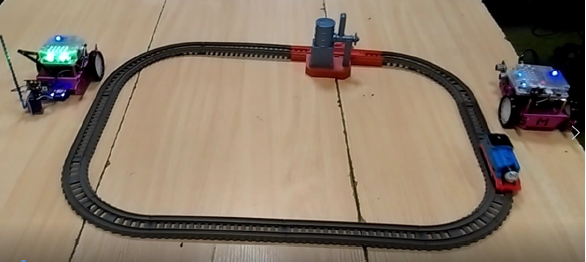
Esta actividad creará un paso a nivel de un tren utilizando el mBot.
La actividad consta de dos partes:
- Comunicación entre robots..
- Uso del servomotor.
La tarea es construir el modelo de carril con paso para coches. El primer robot utiliza el sensor de ultrasonido para detectar el tren. Cuando el tren está frente al sensor, el robot envía el masaje al segundo robot. El segundo robot después de recibir el mensaje pone la barrera abajo. Después de pasar el tren la barrera sube.
Comunicación entre robots.
Robot - transmisor envía el mensaje mediante IR. El mensaje se está enviando después de presionar la tecla en el teclado del PC. Más tarde podemos cambiar la situación: el mensaje se envía cuando el sensor nos da un valor específico.
Robot - receptor, después de recibir el mensaje, mueve o enciende la luz (establece los leds a bordo).
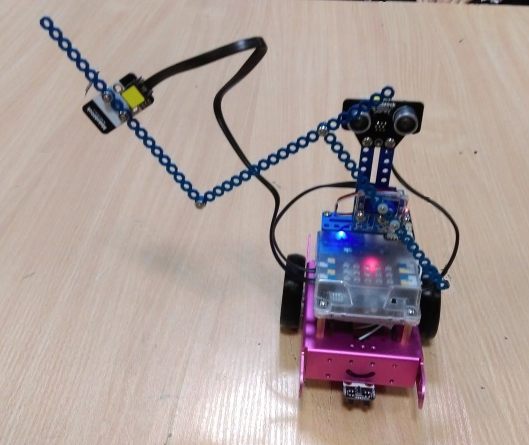
Instalación del Servomotor
Los estudiantes instalan el servomotor al mBot. El estudiante desarrollará un programa simple para comprobar el servo y aprender a controlarlo. Es importante tener en cuenta el número de puerto, la ranura y el valor del ángulo. El valor del ángulo depende de la construcción del robot. Es el número entre 0 y 180.
El robot transmisor, después de observar el tren da la señal "stop".
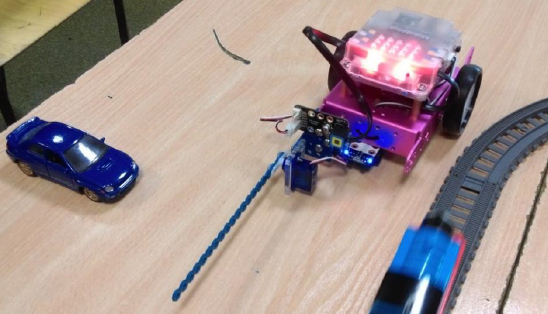
El receptor del robot cambia la posición de la barrera y establece el led en color rojo: detiene el automóvil.
El transmisor del robot debe tener los leds apagados, porque la luz de los leds interfiere con la señal.
La barrera está arriba, cuando el tren está pasando.
El ejemplo de montaje del servo con barrera.
RECURSOS DE LA ACTIVIDAD
Folder: 1File: 1




