Weekly outline
DESCRIPCIÓN DE LA ACTIVIDAD
La actividad consiste en una regata "de relevos", con veleros, basada en la capacidad de los estudiantes para responder preguntas científicas.
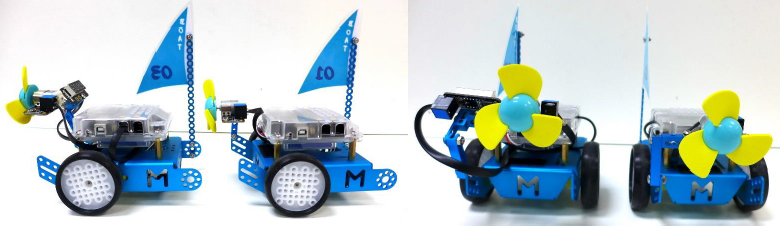
La carrera será entre dos equipos, que navegarán al mismo tiempo. Cada equipo de estudiantes tiene tres veleros: MB01, MB02, MB03 (tres mBots). A medida que avanza la carrera, el programa solicita a los estudiantes preguntas de STEM en la pantalla del ordenador: si el equipo responde correctamente, su próximo barco puede comenzar a navegar y continuar la carrera. El equipo que llegue primero a la línea de meta, ganará.
Combinaremos diferentes programas y rutinas en uno:
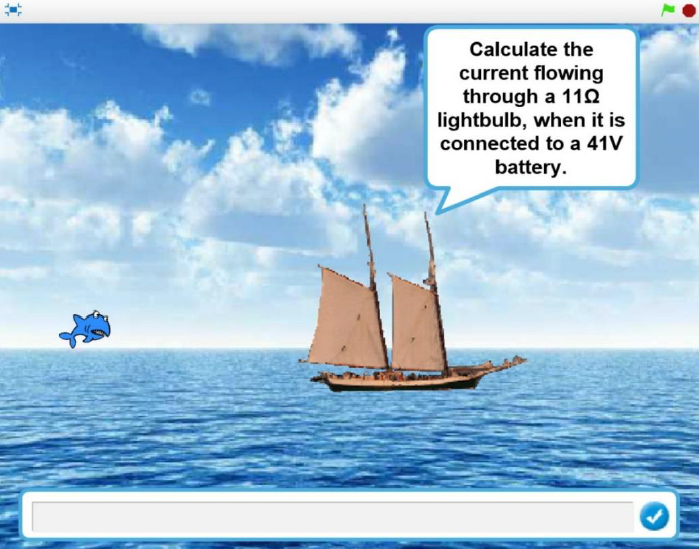
- Enfoque aleatorio a preguntas de diferentes sujetos.
- Acciones condicionadas a eventos.
- Movimiento, efectos luminosos, cronómetro....
- Robots autónomos con su programa grabado en la placa Arduino trabajando en equipo con robots vinculados a un programa de PC.
- Comunicación entre robots mediante el envío de mensajes infrarrojos.
En esta actividad, cada equipo debe responder correctamente dos preguntas STEM. Si lo hacen, el primer velero (MB1) comenzará a navegar. Si no dan la respuesta correcta, el programa les hará otra pregunta. Este procedimiento continuará hasta que dos preguntas sean respondidas correctamente.
El tiempo comenzará a contar desde el inicio del programa. El tiempo se reflejará en una pantalla ubicada en el tercer mBot (MB3). Este tercer robot es el que cruzará la línea de meta.
El proceso se repite dos veces más:
- Después de adivinar otras 2 preguntas, el MB2 avanzará hacia el MB3.
- Finalmente, al responder las últimas 2 preguntas, el MB3 avanzará hacia la línea de meta. Cuando llegue, el cronómetro se detendrá.
El programa principal se ejecutará desde un PC y se conectará al MB1 a través de la conexión Wi-Fi o Bluetooth.
Los robots MB2 y MB3 funcionarán de forma autónoma. Sus propios códigos tienen que ser registrados en sus placas Arduino.
El MB1 realizará una conexión entre el programa de PC y los robots autónomos (MB2 y MB3) enviándoles mensajes para que ejecuten sus rutinas en el momento adecuado.
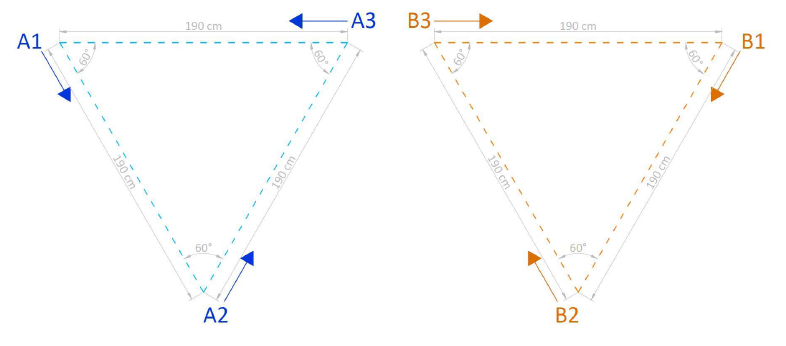
La configuración de movimientos y tiempos de espera se ha realizado de acuerdo con la ruta para la regata, que podemos ver en el siguiente esquema.
Cualquier cambio en la distancia de separación entre mBots significa que debemos ajustar estos parámetros en las rutinas de código afectadas.
RECURSOS DE LA ACTIVIDAD
Folder: 1File: 1




