Topic outline
ACTIVITY DESCRIPTION
First Version
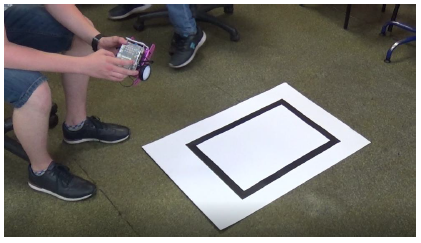
The students’ task is to count the area of figures (rectangle, parallelogram, rhombus) by using the robot. The robot is equipped with a line sensor. There is a table with the robot speed expressed in cm/s.
Second Version
Students use ultrasonic sensor to measure the distance. mBot will help the students to calculate distances, as well as the areas and perimeters, since it will ask the student to place him in the ideal position to be able to perform the operation independently.
FIRST VERSION
Students will get paper sheets with a geometric figure. The students' previous activity was to construct a robot that calculates the pasage time in black sections. There is a table with robot speed:
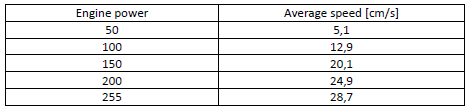
The robot shows the passage time through sections. These results are entered into the program to count the area of figure.
The robot speed is showed in the 'counting the figure area' program. The speed of the robot is constant for every passing. You can read the robot speed from the table. After that we give the passage time on both sides of the rectangle. Time is used to calculate the stretches length. We count the area of figure according to the formula and display it.
SECOND VERSION
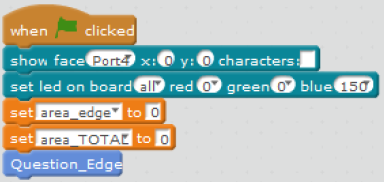
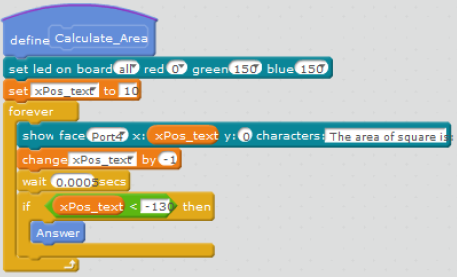
When we click in the green flat, the program will be start. We initialize the variables to 0 and mBot will ask the question.
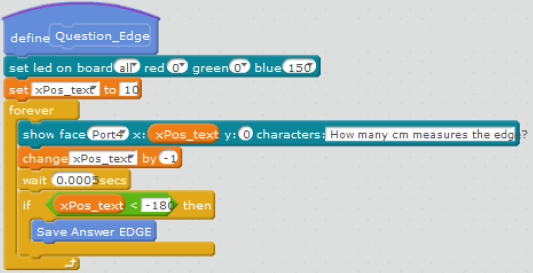
mBot display on the Led Matrix: "the area of square is:”
MORE INFORMATION
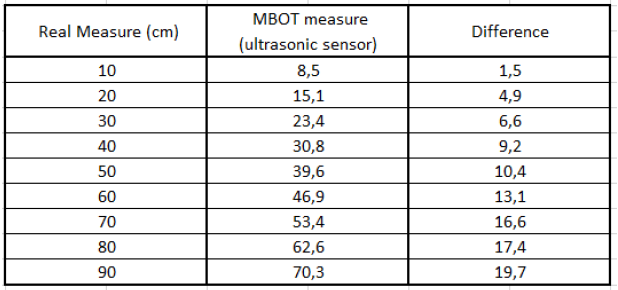
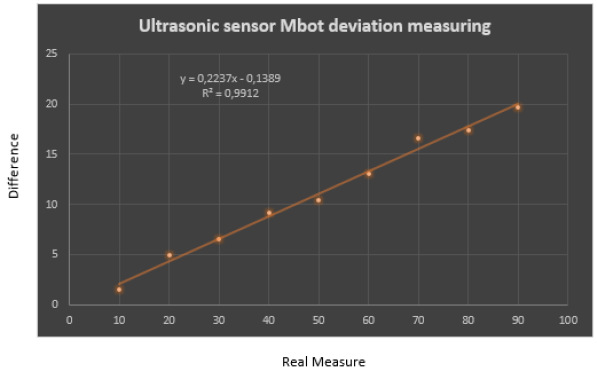
With the help of a meter, we realized that the ultrasound sensor measured less than the real measurement, so we decided to make a table with the real measurement and the measure calculated by the mBot, in this way we could calculate a correction factor to make the measure of the mBot as accurate as possible.
ACTIVITY RESOURCES
File: 1Folder: 1




