Indice degli argomenti
ACTIVITY PRESENTATION
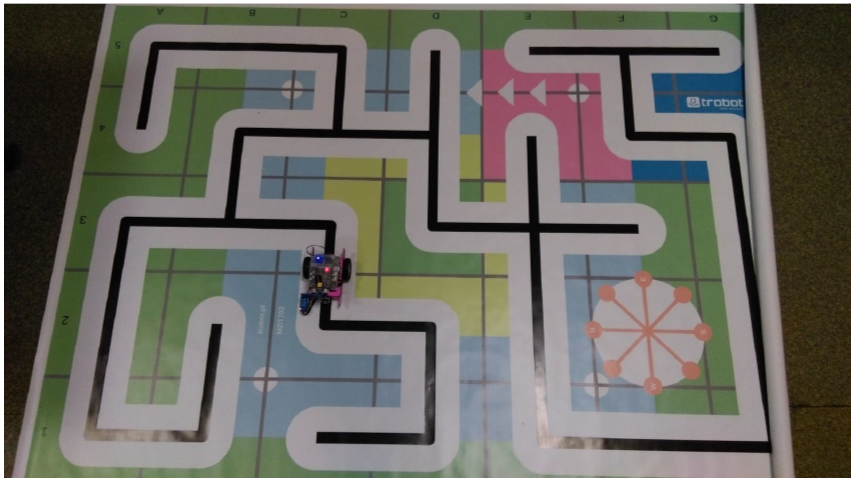
The objective of the activity is to program the mBot so that, autonomously, it is able to solve the labyrinth.
This activity has two versions, in the first version the labyrinths are made with a black line, where the mBot uses two sensors following lines.

In the second verison, the labyrinth is made up of walls. For its resolution, the robot uses an ultrasound sensor to follow the wall and a line follower sensor to detect the front walls.


ACTIVITY RESOURCES
Cartella: 1File: 1




