Topic outline
ACTIVITY DESCRIPTION
The idea is to promote the cleaning in the classrooms, through a game.
It would be a competition between 2 mBots. The contest consists of collecting garbage from the ground of the classroom.
The mBot that collects the most, wins.
The fact of winning invites us to reflect on the large number of elements that the students throw to the ground and not to the appropriate containers. It also invites to modify those incorrect habits.
The mBot robot has to be programmed so that it can pick up small bags from the ground. The robot will also have to take the bags to their container. The code must also have a counter part, where the quantity of bags collected is played. All this must be done with a determined time, by means of a chronometer.
This activity consists of collecting the largest possible number of trash bags, in a certain time.
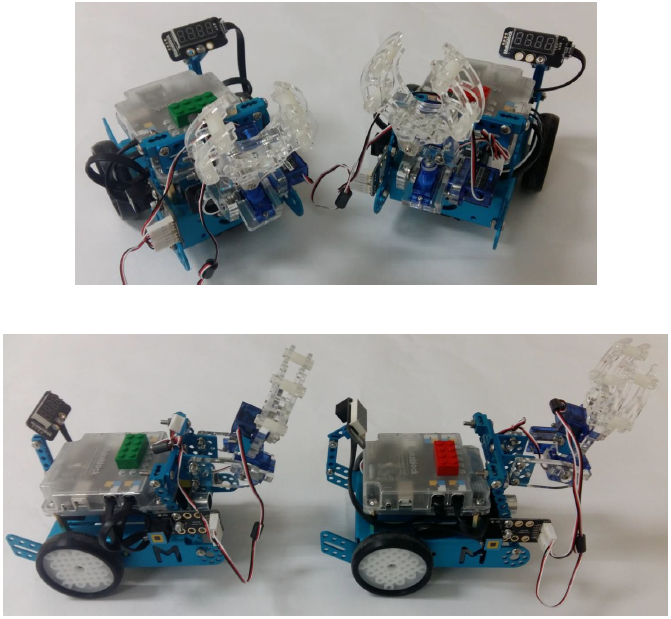
To achieve this goal, students will have to design everything related to the programming of movement (both, the mBot and the gripper & pan-tilt movements). In addition, they will have to program different sound and dance effects for the activity.
MORE INFORMATION
DIFFICULTIES:
- GRIPPER & PAN-TILT: when the servo motors look for a certain angle, sometimes they do not stop at all. This can hinder the operation of some sensors such as the ultrasonic sensor.
- GRIPPER & PAN-TILT: it´s very important to follow properly the instructions in order to build them up in the right way and direction.
- GRIPPER & PAN-TILT: do not force the servo motors with your hands.
- ULTRASONIC SENSOR: it can be used for avoiding obstacles, when they are right in front of the MBot. If the obstacle is in a certain angle with respect to the MBot, the ultrasonic does not work, and the robot can not avoid it.
ACTIVITY RESOURCES
Files: 2




