General

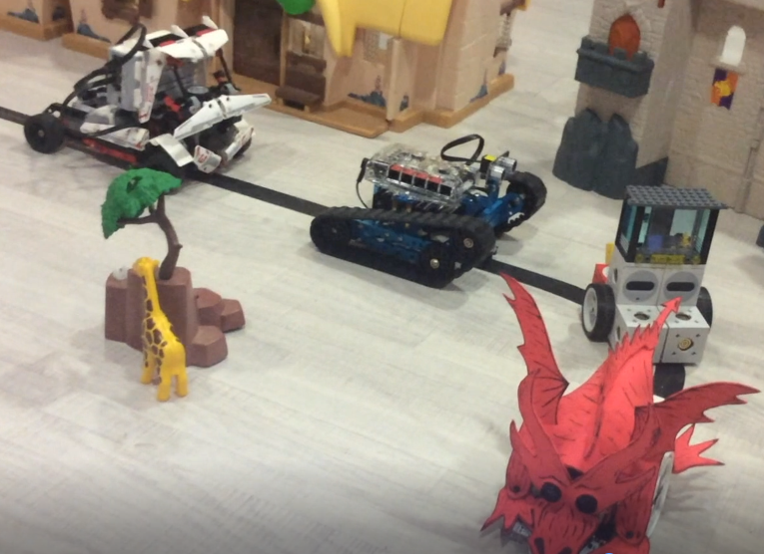
As a first activity, we propose the programming of different robots so that they are able to follow the black line and in case of finding an obstacle stop.

The objective of this activity is to show different robots and alternatives to mBot, so all the robots have been programmed to perform the same task through different softwares.

Next, we will show some code captures that have been used in the different robots for the programming of the following lines:
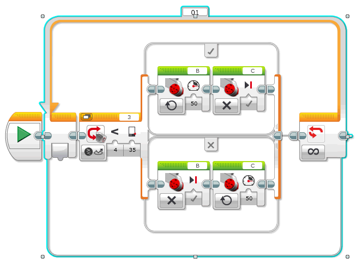
LEGO MINDSTORMS CODE
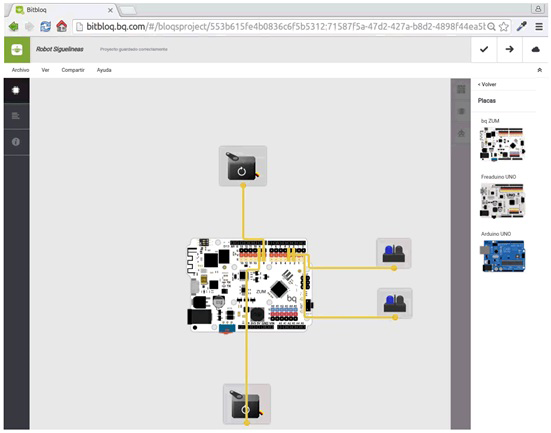
BQ PRINT EVOLUTION

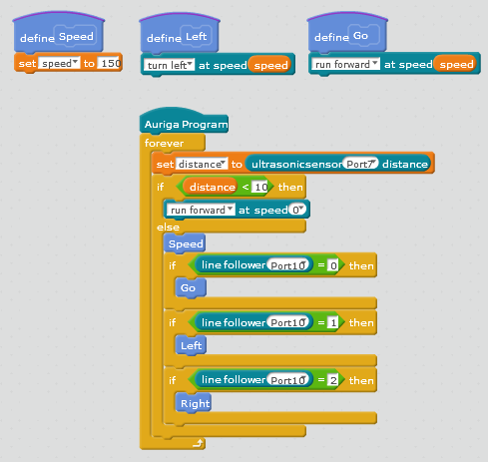
MBOT
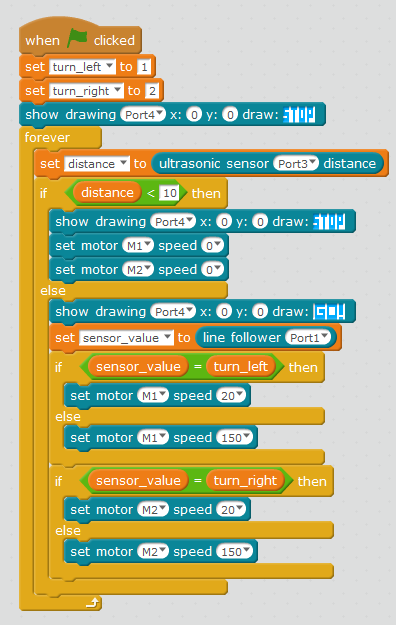
MBOT RANGER