Diagrama semanal
DESCRIPCIÓN DE LA ACTIVIDAD
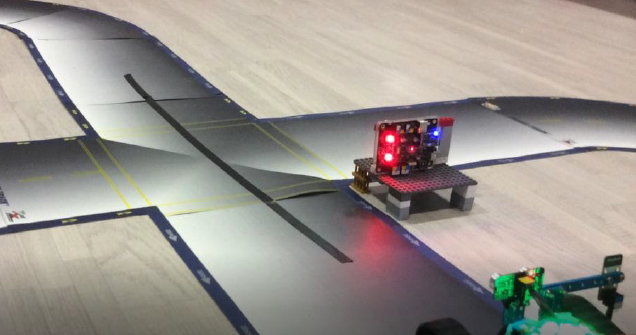
Esta actividad es un campo de juego para explorar técnicas de reconocimiento de color y controles de servomotores. Se discute tanto el uso directo de un sensor de color recién lanzado como las mediciones de reflexión de luz. En el primer caso, el semáforo se realiza con un escudo led, mientras que en el segundo, el mBot equipado con servocontrol, se detiene y actúa como el semáforo girando un disco de color. El robot principal, en cambio, lee el color del semáforo y avanza o se detiene en consecuencia.
Algunos alumnos desconocen la composición de los colores, que se realiza a través de los colores primarios y secundarios.
Un robot recorre un camino determinado, lee el color del semáforo y avanza o se detiene en consecuencia. En una configuración (configuración a), el semáforo grabado en una placa Arduino y los colores se detectan a través de un sensor de color. En la configuración b, en cambio, un mBot, equipado con servocontrol, se detiene y actúa como el semáforo (girando un disco de color) y la detección de color se realiza a través de mediciones ópticas en geometría reflectante.
PRIMERA VERSIÓN
La actividad consiste en dibujar un circuito con cinta negra, crear un semáforo con la placa mCore y gracias al sensor de color, cuando el robot detecta la luz roja se detendrá, con la luz amarilla disminuirá considerablemente su velocidad y cuando detecta la luz verde, continuará la velocidad o acelerará.
Cuando Ranger detecta el color rojo se detiene:
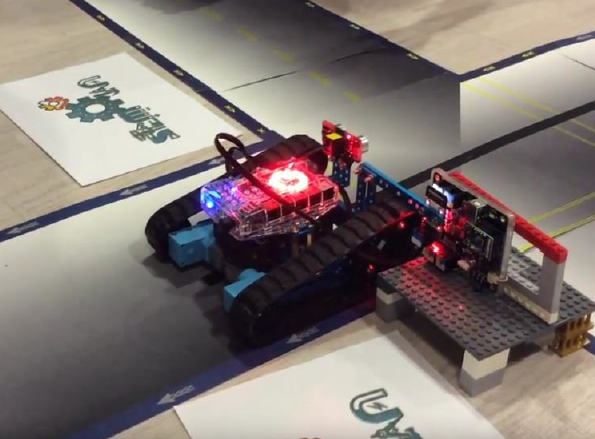
Y si el color es amarillo, su velocidad es menor y si el color es verde, el mBot Ranger continuará:

SEGUNDA VERSIÓN
Enumeramos los pasos simples necesarios para jugar la actividad, discutimos la técnica de detección de color e ilustramos el algoritmo y el código.
- Configure el "camino": una pista de cinta negra que puede seguir el mBot.
- Configurar los semáforos:
- Instale la placa Arduino en un soporte adecuado.
- Elija un mBot para actuar como el semáforo. Montar en él, el adaptador RJ25 y el micro servo control. En nuestro caso, instalamos el servo mirando hacia abajo. Prepare un disco de papel de aproximadamente 15 cm de diámetro, divídalo en tres sectores de colores: amarillo, verde, rojo (o solo dos, descartando el amarillo). Haga un agujero en el centro del disco y móntelo de manera segura en el servocontrol.
- Cargue el código en los mBot (s) / mBot Ranger que actúan como el (los) automóvil (s) y en los semáforos (mbot o placa Arduino).
- ¡Jugar el juego! Cuando el mBot llegue al semáforo y si está:
- VERDE seguirá avanzando.
- AMARILLO disminuirá su velocidad, pero continuará avanzando.
- ROJO se detendrá en el semáforo y continuará detectando colores, para comenzar de nuevo cuando el semáforo se vuelva verde.
Detección de luz y color en geometría reflectiva.
En física, hablamos de un experimento de dispersión cuando una radiación dada (por ejemplo, la luz, como en nuestro caso) se envía a la muestra / superficie investigada y se mide la intensidad de la radiación dispersada. Esto se puede hacer en: Geometría de transmisión, donde se mide la radiación que ha pasado por la muestra y ha emergido en el otro lado 1; o Geometría reflexiva, donde se detecta la radiación que se refleja en la muestra y regresa casi en la misma dirección del haz incidente. Esta configuración también se conoce como retrodispersión.
Si recordamos el mecanismo de nuestra visión de color, es fácil comprender que los colores pueden detectarse mediante la dispersión de la luz: un objeto aparece, por ejemplo, verde, porque refleja la luz verde y absorbe la luz azul y roja.
Por lo tanto, si enfocamos el objeto con luz roja, tendremos una baja intensidad reflejada, mientras que si usamos radiación incidente verde obtendremos una alta intensidad dispersada. Más en general, cada color reflejará principalmente la luz del mismo color; en el caso de un objeto blanco, todos los colores se reflejarán con alta intensidad, mientras que un objeto negro absorbería la mayoría de la radiación.
Para realizar la medición del color, encendemos alternativamente la luz roja, azul y verde en el módulo led y con el módulo sensor de luz detectamos la intensidad reflejada para cada color. El software luego elabora los resultados.
Para que la medición funcione correctamente, es necesario abrazar el sensor de luz en un pequeño tubo negro (utilizamos tubos estándar termorretráctiles para cables eléctricos) a fin de reducir el ruido proveniente del ambiente (por ejemplo, la luz solar).
RECURSOS DE LA ACTIVIDAD
Carpeta: 1Archivo: 1




