PRIMERA VERSIÓN
La actividad consiste en dibujar un circuito con cinta negra, crear un semáforo con la placa mCore y gracias al sensor de color, cuando el robot detecta la luz roja se detendrá, con la luz amarilla disminuirá considerablemente su velocidad y cuando detecta la luz verde, continuará la velocidad o acelerará.
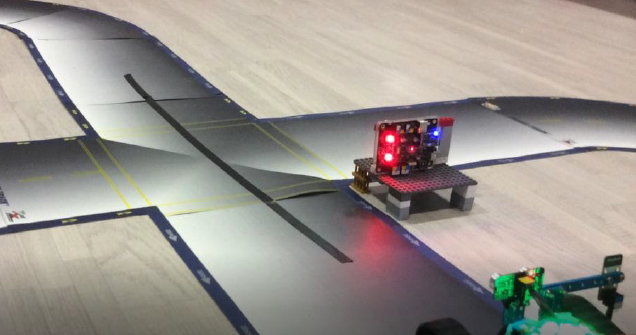
Cuando Ranger detecta el color rojo se detiene:
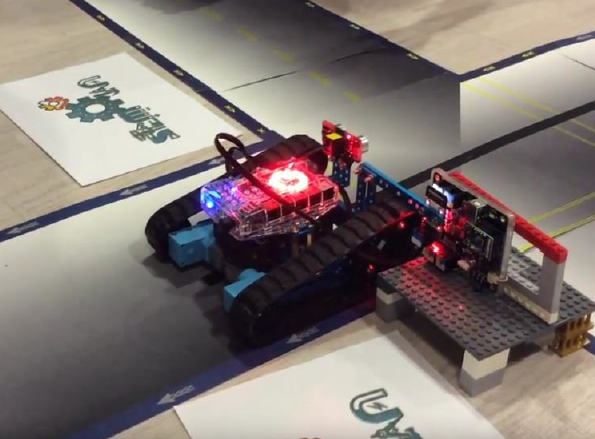
Y si el color es amarillo, su velocidad es menor y si el color es verde, el mBot Ranger continuará:





