Diagrama semanal
DESCRIPCIÓN DE LA ACTIVIDAD
Las Leyes de Kepler no siempre son fáciles de entender, especialmente por estudiantes más jóvenes o estudiantes de escuelas profesionales, que tienden a verlo como un tecnicismo lejos de su interés. mBot y su sensor de llama permiten simular este movimiento para poder captarlo fácilmente de una vez, y el material de apoyo sugiere una forma de plantear el tema en el contexto más amplio de la investigación cosmológica, para comprender mejor su importancia.
La actividad utiliza el sensor de llama: cuando el mBot está más cerca del fuego, corre más rápido.
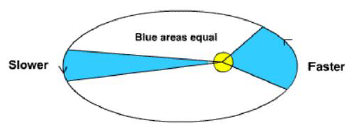
Simule el movimiento de un planeta alrededor del sol, siguiendo un camino elíptico con velocidad variable según la segunda ley de Kepler (en realidad, una consecuencia de la conservación del momento angular).
"La línea que une un planeta y el Sol barre áreas iguales durante intervalos de tiempo iguales"
El sensor de llama se utiliza para simular el movimiento de un planeta alrededor del sol. Desde la salida (el output) del sensor, se relaciona con la distancia, se selecciona la potencia del motor. A continuación, enumeramos los sencillos pasos necesarios para desarrollar la actividad, detallamos las características del sensor de llama y explicamos los motivos de nuestra elección del algoritmo. Finalmente comentamos el código y las variables utilizadas en él. A través del texto, los consejos útiles que conducen a mejores resultados se mencionan y se resaltan en color naranja.
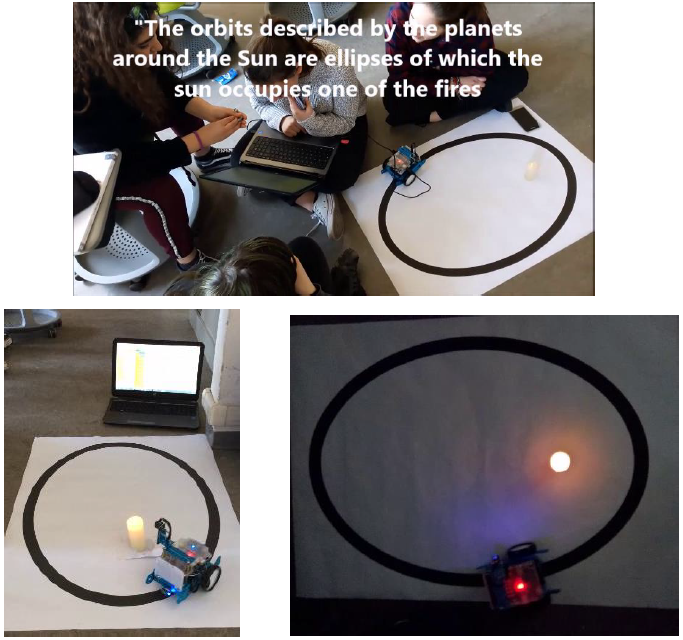
- Encienda la vela y colóquela en el foco de la elipse. Es mejor usar una elipse con una excentricidad relativamente grande para ver fácilmente el cambio en la velocidad. (Utilizamos una elipse con semiejes de 40 cm y 25 cm).
- Coloque el mBot en el camino, orientado a correr en sentido horario.
- Presione el botón de la placa para iniciar la simulación.
- La velocidad del mBot cambiará durante el experimento de acuerdo con la distancia desde la vela.
El experimento funciona mejor si apagas las luces y, lo más importante, evita la luz del sol (o al menos que apenas sea visible). De hecho, recuerde que no se detecta luz, sino radiación infrarroja (= calor).
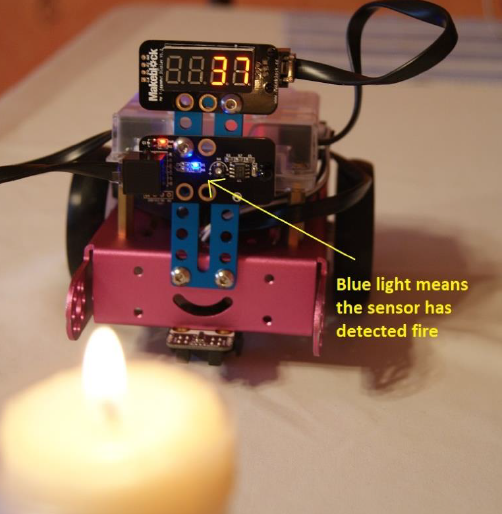
El sensor de llama es un detector de radiación infrarroja. De acuerdo con la documentación disponible [1], es capaz de detectar la radiación con una longitud de onda en el rango de 760nm a 1100nm, con la sensibilidad más alta alcanzada cerca de 940nm. Debería poder detectar radiación hasta una distancia de 1m y dentro de un ángulo de 60°. Cuando se detecta una llama, su indicador azul se encenderá.
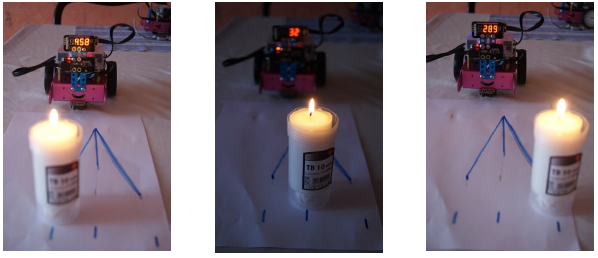
El sensor de llama tiene salidas tanto analógicas como digitales. Los posibles valores digitales son solo "Fire" y "NoFire"; La lectura analógica devuelve valores de 10 a 1023: un número más pequeño significa que el sensor está más cerca del fuego. En un cuarto oscuro obtendrás 1023.
Una prueba experimental para detectar la salida del sensor en función de la distancia, devuelve los datos trazados en la siguiente figura.
When the "Fire” status will be active the blue led on the sensor board will turn on.
Debido a la respuesta no lineal del sensor y a su precisión limitada (los resultados repetidos dan valores ligeramente diferentes), decidimos omitir el cálculo intermedio de velocidad y crear una tabla de correspondencia (salida del sensor en un cierto rango) --- & gt; (seleccione una potencia). La potencia aumenta al acercarse y disminuye al alejarse del "sol". Como ya se indicó en la introducción, la precisión está limitada ya que el sensor de llama detecta no solo la llama sino también la luz de la habitación, especialmente la luz solar. Por lo tanto, es muy difícil calcular la velocidad exacta de acuerdo con la Ley de Kepler y los resultados de la actividad son más cualitativos que cuantitativos. Sin embargo, en un aula suficientemente oscura, apreciará el cambio de velocidad y obtendrá una imagen satisfactoria de lo que está sucediendo durante el movimiento planetario.
Podemos sugerir dos posibles mejoras:
- Use una elipse más pequeña, con una distancia máxima entre el Sol y la Tierra de 40 cm, para estar dentro de la región de respuesta lineal del sensor. Esto podría permitir utilizar el valor exacto del sensor y evaluar la velocidad correspondiente (distancia * velocidad = costante) sin usar la tabla de correspondencia, que no puede ser tan precisa. Sin embargo, una elipse más pequeña puede ser adecuada para mostrar la simulación solo a pequeños grupos de estudiantes.
- Regresando a la actividad "cálculo de velocidades" y seleccione la potencia del motor en relación con la velocidad efectiva (de nuevo, la relación demostró no ser lineal). Esta pequeña corrección podría apreciarse solo en la región de respuesta lineal del sensor.
RECURSOS DE LA ACTIVIDAD
Archivos: 2




