Diagrama semanal
DESCRIPCIÓN DE LA ACTIVIDAD
La idea es promover la limpieza en las aulas, a través de un juego.
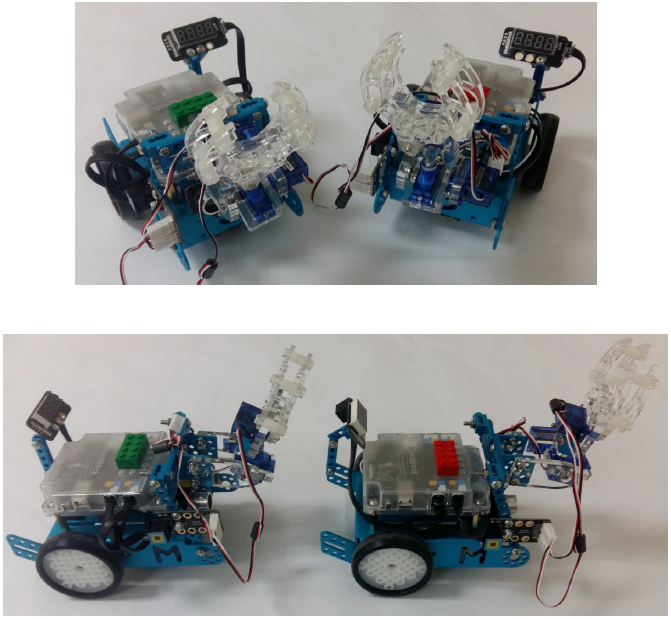
Sería una competición entre 2 mBots. El concurso consiste en recoger la basura del suelo del aula.
El mBot que más basura recaude, gana.
El hecho de ganar nos invita a reflexionar sobre la gran cantidad de elementos que los estudiantes arrojan al suelo y no a los contenedores apropiados. También invita a modificar esos hábitos incorrectos.
El robot mBot tiene que ser programado para que pueda recoger pequeñas bolsas del suelo. El robot también tendrá que llevar las bolsas a su contenedor. El código también debe tener una parte contraria, donde se juega la cantidad de bolsas recolectadas. Todo esto debe hacerse con un tiempo determinado, mediante un cronómetro.
Para lograr este objetivo, los estudiantes tendrán que diseñar todo lo relacionado con la programación del movimiento (mBot y la pinza y los movimientos de apertura y cierre de ésta). Además, tendrán que programar diferentes efectos de sonido y baile para la actividad.
MÁS INFORMACIÓN
DIFICULTADES:
- GRIPPER & PAN-TILT: cuando los servomotores buscan un cierto ángulo, a veces no se detienen en absoluto. Esto puede dificultar el funcionamiento de algunos sensores, como el sensor de ultrasonido.
- GRIPPER & PAN-TILT: es muy importante seguir correctamente las instrucciones para construirlas de la manera y la dirección correctas.
- GRIPPER & PAN-TILT: no fuerce los servomotores con sus manos.
- SENSOR DE ULTRASONIDO: se puede utilizar para evitar obstáculos, cuando están justo delante del mBot. Si el obstáculo está en un cierto ángulo con respecto al mBot, el ultrasonido no funciona y el robot no puede evitarlo.
RECURSOS DE LA ACTIVIDAD
Archivos: 2




