Diagrama semanal
DESCRIPCIÓN DE LA ACTIVIDAD
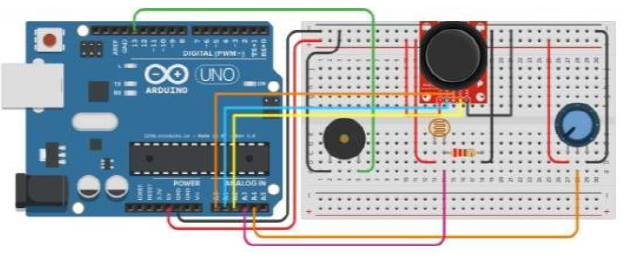
En la primera parte, se utiliza el mBot y el Joystick de Makeblock para controlar el movimiento del robot. El joystick y el robot están conectados por un cable. La velocidad del robot está determinada por la desviación del joystick.
En la segunda parte, se ha creado un juego en el que se precisa del joystick, para jugar.
PRIMERA VERSIÓN
El módulo Joystick se utiliza para controlar la dirección de movimiento del mBot y el videojuego interactivo. Tiene un puerto analógico y debe estar conectado al puerto de color negro del mBot.
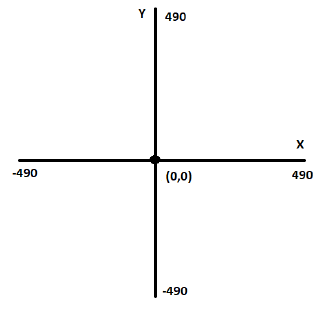
En la posición neutral, el eje X y el eje Y dan el número 0, pero oscila entre -2 y 2. Cuando se mueve el stick a otra posición, este valor cambia. El mínimo es -490 y el máximo es 490.
Tenga cuidado con el valor 490. Cuando empuja el joystick a la posición máxima, el valor es 486-490, porque es un valor analógico.
SEGUNDA VERSIÓN
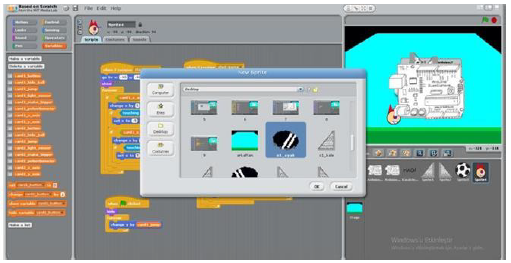
En esta versión, se utiliza el joystick para jugar a un juego creado en Scratch.
Para controlar la velocidad del robot, tenemos que transformar los valores analógicos del intervalo (-490,490,) al digital del intervalo (-250,250).
Debemos utilizar la función proporcional "y" lineal: y = ax + b.
S4A es una modificación Scratch que permite la programación simple de la plataforma de hardware de código abierto Arduino. Proporciona nuevos bloques para la gestión de sensores y actuadores conectados a Arduino. También hay un panel de informes de sensores similar al de PicoBoard.
RECURSOS DE LA ACTIVIDAD
Archivos: 2




