Diagrama semanal
DESCRIPCIÓN DE LA ACTIVIDAD
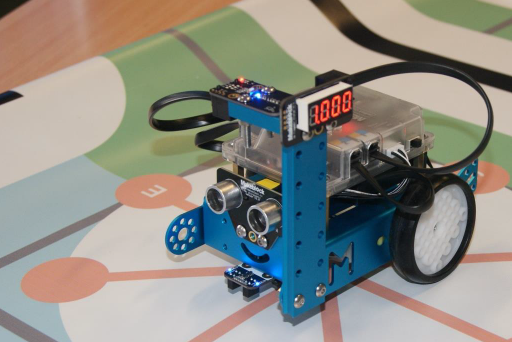
La idea es programar el mBot para buscar un objeto en un área limitada.
El objeto podría ser un bloque alto o una botella, y el mBot tratará de encontrarlo usando el sensor de ultrasonido.
Utilizamos la brújula para mantener la dirección y los ángulos para cambiarla.
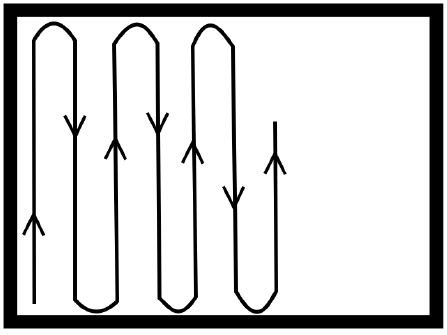
Cuando el robot detecta una línea negra, debe hacer un giro de 180°, pero de tal manera que pueda evitar la búsqueda en la misma área una vez más y que no se pierda el área demasiado amplia. También debemos prestar atención al hecho de que un robot debe girar a la izquierda y a la derecha alternativamente. Esa breve descripción se puede dividir en los siguientes problemas a resolver:
- Avanzando hacia adelante.
- Giro de 180°.
- Alternar giros.
- Gire habilitando la exploración de toda el área, pero evitando repetir la ruta.
RECURSOS DE LA ACTIVIDAD
Archivos: 2




