Diagrama semanal
DESCRIPCIÓN DE LA ACTIVIDAD
La actividad consiste en desarrollar un radar de velocidad. El mBot actuará como un radar de velocidad. Detectará un vehículo que circula por delante y medirá su velocidad. Para este propósito el mBot utilizará un sensor de distancia o ultrasonido.
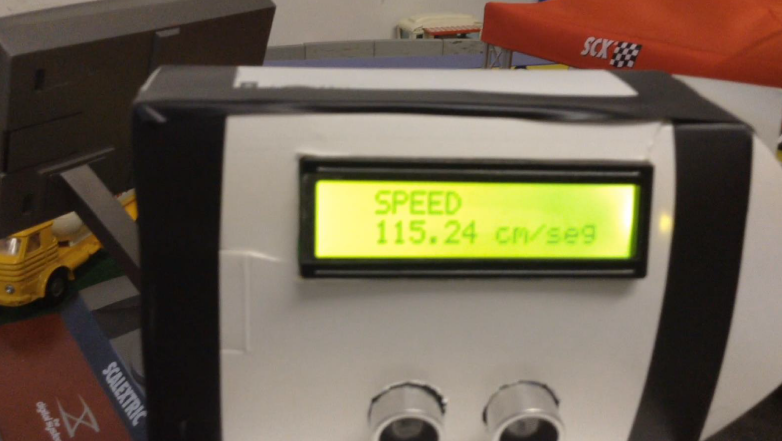
Podrá calcular la velocidad (cm/s) a la que se mueve un objeto.
Para la primera versión, se usará una placa Arduino Uno.
En la segunda versión, se crea exclusivamente con el hardware mBot. También propone la conversión de cm/s a km/h, ya que es una unidad de medida más reconocible por los estudiantes.
PRIMERA VERSIÓN (con Arduino)
El radar de velocidad calculará la velocidad, en cm/seg, a la que se mueve un objeto. En este caso serán coches de Scalextric. La velocidad se calculará a través del sensor de ultrasonido de Arduino.
En primer lugar, creamos la estructura Arduino y conectamos los sensores.
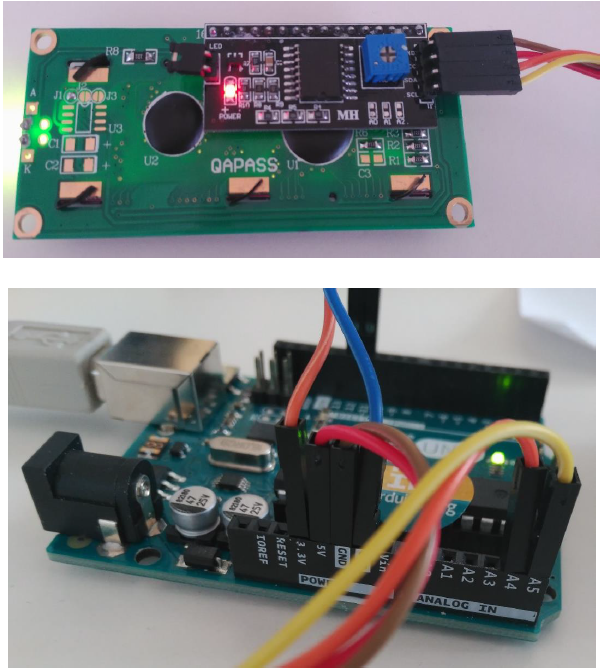
- Conectamos la pantalla LCD Display a la placa Arduino:
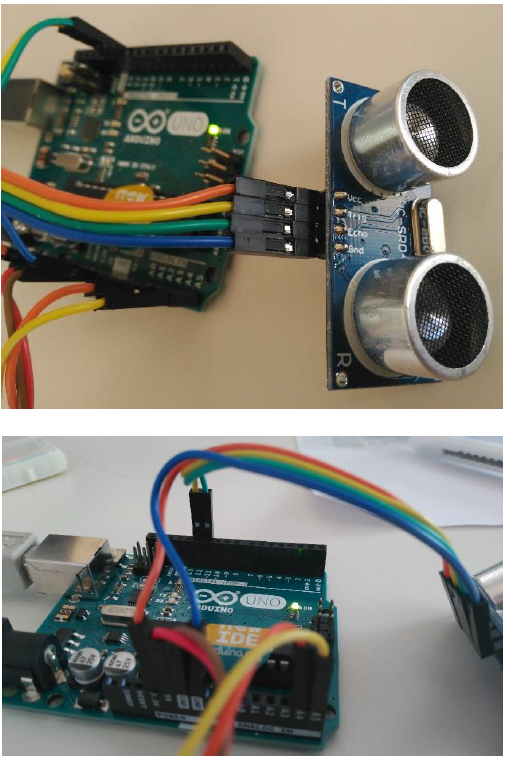
- Conectamos el sensor de ultrasonido a la placa Arduino:
- Creamos la estructura del radar:
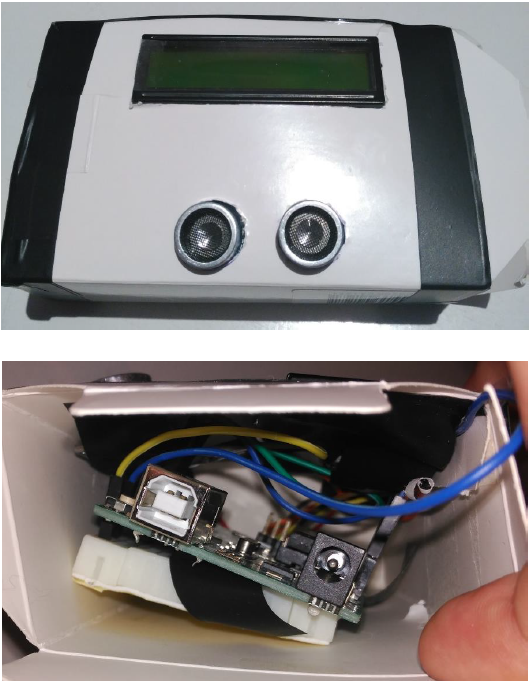
Os dejamos algunas imágenes de ejemplo:


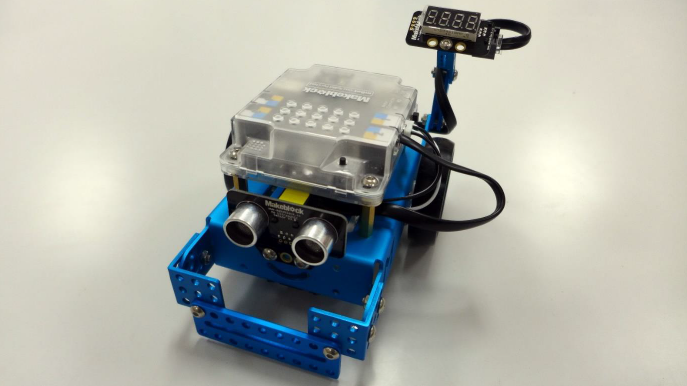
SEGUNDA VERSIÓN (sin Arduino)
El trabajo de los estudiantes es conocer la fórmula matemática que relaciona la velocidad, el espacio y el tiempo y con la ayuda del profesor, crear el diagrama de flujo y desarrollar el código que permite que el mBot funcione como un radar de velocidad.
La variable "espacio" se obtendrá por la diferencia entre dos distancias medidas. La variable "tiempo", será el intervalo de tiempo entre esas dos mediciones.
El radar de velocidad permanecerá en modo de espera hasta que pase un "vehículo" delante de él. En ese momento, calculará la velocidad del vehículo y lo mostrará en la pantalla de 7 segmentos. (Se calculará en km/h).
RECURSOS DE LA ACTIVIDAD
Carpeta: 1Archivo: 1




