INTRODUCCIÓN
Usando el robot MBOT montado previamente, los estudiantes analizan algunos argumentos fundamentales de la programación. Se realizarán aplicaciones sencillas, introduciendo 5 estructuras de control de programación.
El propósito de este módulo es resolver problemas básicos y desarrollar habilidades básicas de programación. Al final de éste aprendizaje, los estudiantes no sólo verifican las aplicaciones complejas, sino que también prueban las estructuras de control y el potencial básico del entorno de programación. Simples ejercicios básicos para familiarizarse con la programación.
A continuación, puede encontrar algunos programas simples con el sensor de ultrasonidos.
Conozca la distancia a través del sensor de ultrasonido.
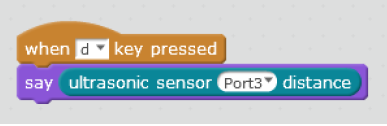
Observa, el "panda", te muestra la distancia al presionar la tecla "d". Solo te mostrará la distancia que calcula el sensor de ultrasonidos cuando pulses la tecla.
Ahora vamos a hacer una modificación:
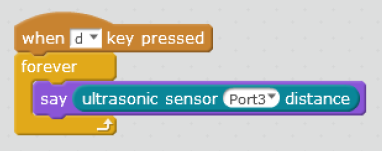
Ahora, después de presionar la tecla "d", puedes ver como el número está cambiando constantemente, ya que al introducir un bucle en el código, el "panda" muestra continuamente el valor calculado del sensor de ultrasonidos.
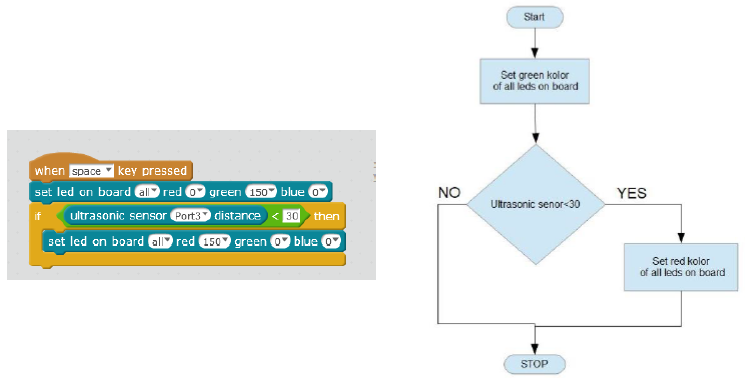
El programa empezará al pulsar la tecla "espacio".
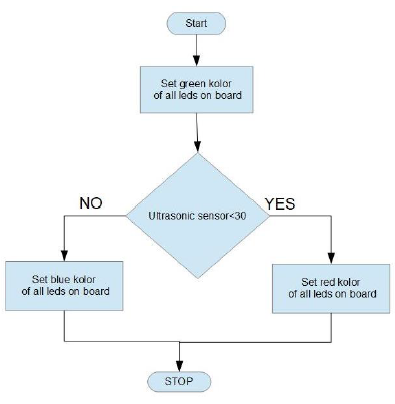
El led de a bordo se establecerá en verde.
Si el valor calculado del sensor de ultrasonido es inferior a 30, el led cambiará al color rojo.
Inicia el programa varias veces. Cada vez coloque el robot a una distancia diferente de la pared (menos o más de 30).
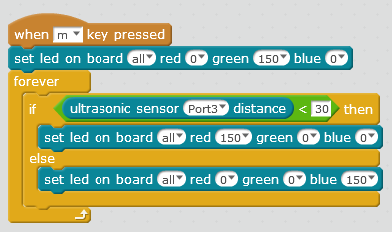
Antes de presionar la tecla "k", coloque el robot a una distancia diferente de la pared. Use el programa varias veces. ¿Puedes ver el color verde? Sino lo visualiza, agregue el bloque "wait" antes y vuelva a intentarlo.
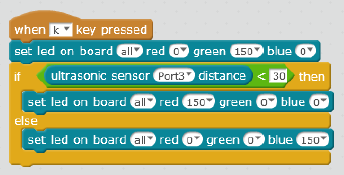
Los ejercicios 2 y 3 te enseñan que el programa funciona solo una vez. En el ejercicio 1 usaste siempre el bucle, y el "panda" te mostraba las lecturas actualizadas. Así que añade el bucle "forever". Esta vez, los leds cambiarán de color dependiendo de la distancia.
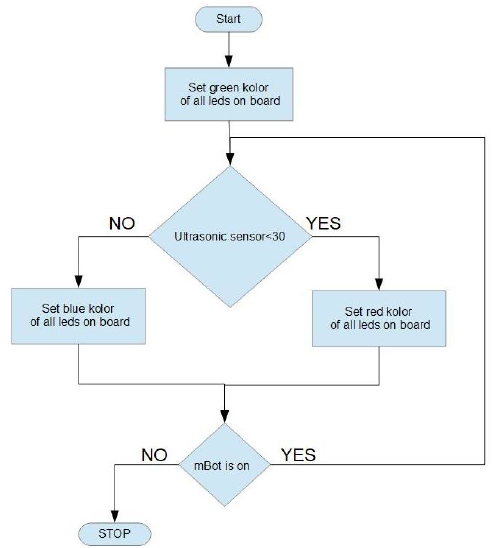
El programa comprueba la condición. Si es falso, el robot realiza instrucciones en bucle. Cuando se cumpla la condición, el programa realiza la siguiente instrucción después del bucle.
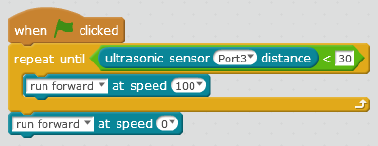
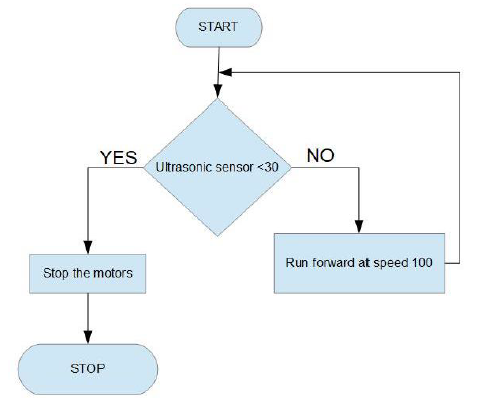
Si el robot se ejecuta cuando está lejos de la pared, la condición será falsa. Pero, cuando el robot se acerque a la pared, la condición se volverá verdadera y el robot se detendrá.




