INTRODUCCIÓN
El programa comprueba la condición. Si es falso, el robot realiza instrucciones en bucle. Cuando se cumpla la condición, el programa realiza la siguiente instrucción después del bucle.
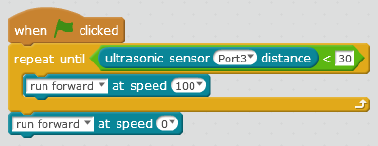
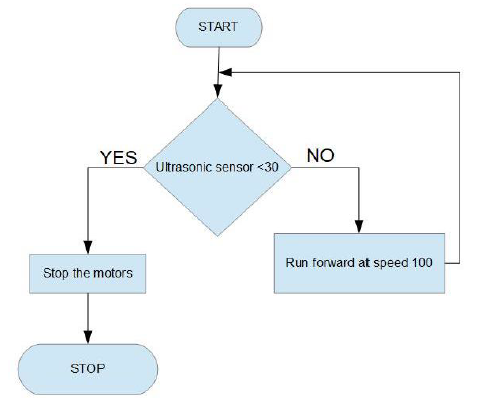
Si el robot se ejecuta cuando está lejos de la pared, la condición será falsa. Pero, cuando el robot se acerque a la pared, la condición se volverá verdadera y el robot se detendrá.




