Indice degli argomenti
ACTIVITY DESCRITION
This activity extend the previous one on “Harmonic Motion” with the aim to offer a direct observation of kinematic variables of interest, like acceleration. Similar observation are useful to older students (15-16 years) for the understanding of the equations of motion ad of their solutions. For younger pupils (12-14 years), it may simply be funny to observe the harmonic motion of the mBot itself, as a complimentary measurement with respect to more standard experiments.
For the full exploitation of the gyroscope, we also developed a short guide about the measurements of pitch and roll angles. You may find it useful in physics laboratories, e.g. in order to measure the slope of an inclined plane and of course to help understanding the principle of navigation control.
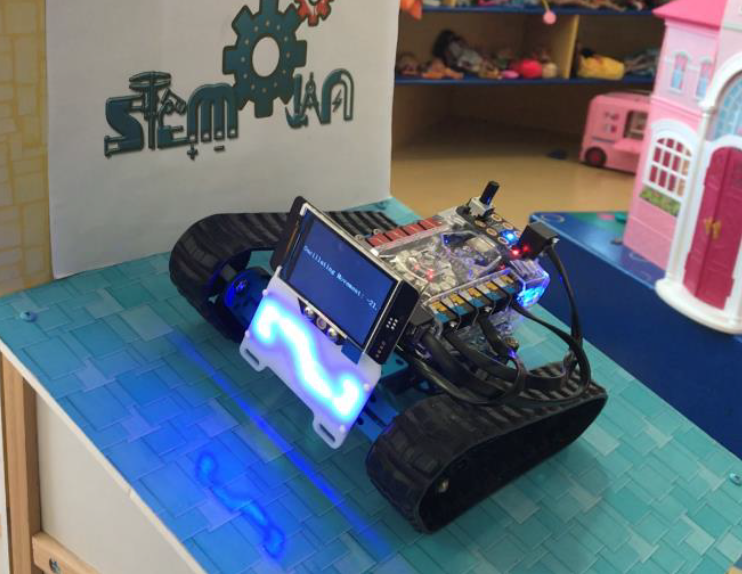
Hang the mBot from a spring and measure the acceleration and the period of its harmonic motion, thanks to a 3-axis Accelerometer and Gyro sensor. Exploit the gyroscope for the purpose of navigation control, by learning about the pitch and roll - and heading) angles.
The accelerometer-gyro sensor is exploited to study the harmonic motion of the mBot attached to a spring, as well as to perform measurements of pitch and roll angles.
FIRST VERSION
In the following we first deal with the acceleration measurements: we list the simple steps needed to play the activity, discuss the characteristics of the Gyro sensor, illustrate the algorithm and code, and finally show the main results. Then, in the second part of the document, we focus on the standard application of the gyroscope to navigation (pitch and roll). Examples and pictures will help to highlight why learning these topics with the mBot results attractive, simple and hence more effective.
Through the text, useful tips leading to better results are mentioned and highlighted in orange color.
The mBot is made to hang from a spring and perform an harmonic motion. From the gyro-sensor outputs, proportional to acceleration, the oscillation period is evaluated. Both mBlock (Scratch) and Arduino versions of the code are made available. In Arduino, the sensor data are shown in serial output and can be plot in an external software in order to get a deeper understanding of the equations of motion.
SECOND VERSION
Roll Angle and Oscillating Motion
To carry out the activity, and to be able to calculate the oscillating movement to which the mBot can be subjected, we need to know what the roll angle is. It is defined as the angle of lateral inclination that the perpendicular of the plane of the vehicle forms with forms the vertical. When the mBot is in a horizontal plane, the angle of inclination will be approximately 0, since it has a small margin of error.
When the mBot is in an inclined plane, the angle of inclination will be equal to that of the surface. In addition, the Ranger will show graphically in the LED Matrix its lateral inclination, that is, the angle it presents with respect to the longitudinal axis (Y). If this angle exceeds the value set by the potentiometer, it will warn of this by means of an acoustic and luminous signal.
Since the Auriga board that the Ranger incorporates has an integrated inertial measurement module (IMU) with a gyro and a 3-axis accelerometer, so it is enough to use the accelerometer value corresponding to the longitudinal axis of the Ranger (Y axis) to obtain the lateral angle of inclination directly.
Pitch Angle
The Pitch Movement, whose name is of nautical origin, is used in the automotive world to indicate the longitudinal inclination of a vehicle with respect to the horizontal plane. In particular the pitch angle is the one that the longitudinal axis of the vehicle forms with the horizontal plane.
When traveling on a horizontal road the pitch angle will be approximately 0, since there is a small deviation of the sensor. When going up a slope, we will have a positive pitch angle. During the activity, the Ranger will graphically show in the LED Matrix its longitudinal inclination, that is, the angle of pitch or turn it presents with respect to the transverse axis (X). If this angle exceeds the value set by the potentiometer, it will warn of this with an acoustic and luminous signal. Also, in the TFT LCD Screen we will show the angle of the plane.

ACTIVITY RESOURCES
Cartella: 1File: 1




