Tematyka
ACTIVITY DESCRIPTION
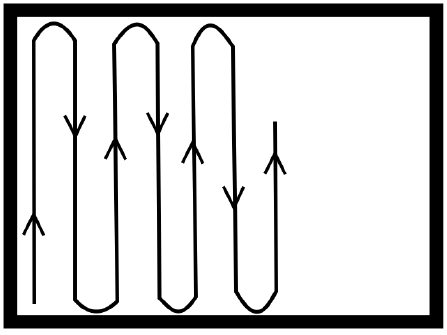
The idea is to program mBot to search a limited area.
Using a robot to find a lost object in limited area. This area is limited by black line. The object could be a high block or bottle and it is found using ultrasonic sensor.
We used compass to keep direction and using angles to change it.
When the robot detects a black line it should make a 180° turn, but in such a way that it can avoid searching in the same area once again and not to miss too wide area. We also have to pay attention to the fact that a robot should be turning left and right alternately. That short description can be divided into following problems to be solved:
- Moving straight forward.
- 180° turn.
- Alternate turns.
- Turn enabling scanning the whole area, but avoiding repeating the route .
ACTIVITY RESOURCES
Pliki: 2




